
Deep Reinforcement Learning for Beginners: Video Tutorial Series
Introduction to Reinforcement Learning
Reinforcement Learning (RL) is an area of machine learning concerned with how intelligent agents ought to take actions in an environment in order to maximize the notion of cumulative reward.
Key Concepts in Reinforcement Learning
Before diving into deep reinforcement learning, it's important to understand the foundational concepts like states, actions, policies, rewards, and value functions.
import gymnasium as gym
import numpy as np
# Create an environment
env = gym.make("CartPole-v1")
# Reset the environment
state = env.reset()
# Take a random action
action = env.action_space.sample()
next_state, reward, done, info, _ = env.step(action)
print(f"State: {state}")
print(f"Action: {action}")
print(f"Reward: {reward}")
print(f"Done: {done}")
Deep Q-Networks (DQN)
In this section, we'll examine how deep neural networks can be used to approximate Q-values in reinforcement learning problems with large state spaces.
What are Deep Q-Networks?
Deep Q-Networks combine Q-learning with deep neural networks to handle high-dimensional state spaces. Instead of maintaining a table of Q-values, we use a neural network to approximate the Q-function.
import torch
import torch.nn as nn
import torch.optim as optim
class DQN(nn.Module):
def __init__(self, input_dim, output_dim):
super(DQN, self).__init__()
self.network = nn.Sequential(
nn.Linear(input_dim, 128),
nn.ReLU(),
nn.Linear(128, 128),
nn.ReLU(),
nn.Linear(128, output_dim)
)
def forward(self, x):
return self.network(x)
# Example instantiation
state_dim = 4 # CartPole has 4 state dimensions
action_dim = 2 # CartPole has 2 possible actions
model = DQN(state_dim, action_dim)
optimizer = optim.Adam(model.parameters(), lr=0.001)
Experience Replay
One of the key innovations in DQN is experience replay, which helps break correlations between consecutive samples:
class ReplayBuffer:
def __init__(self, capacity):
self.capacity = capacity
self.buffer = []
self.position = 0
def push(self, state, action, reward, next_state, done):
if len(self.buffer) < self.capacity:
self.buffer.append(None)
self.buffer[self.position] = (state, action, reward, next_state, done)
self.position = (self.position + 1) % self.capacity
def sample(self, batch_size):
batch = random.sample(self.buffer, batch_size)
state, action, reward, next_state, done = map(np.stack, zip(*batch))
return state, action, reward, next_state, done
def __len__(self):
return len(self.buffer)
Policy Gradient Methods
While DQN focuses on learning value functions, policy gradient methods directly optimize the policy.
Related Posts
More content from the Reinforcement Learning category and similar topics
Learn the fundamentals of Functional Data Analysis and how to implement key techniques using R.
Shared topics:

A simple explaination of projectiong points onto a hyperspace.
Shared topics:
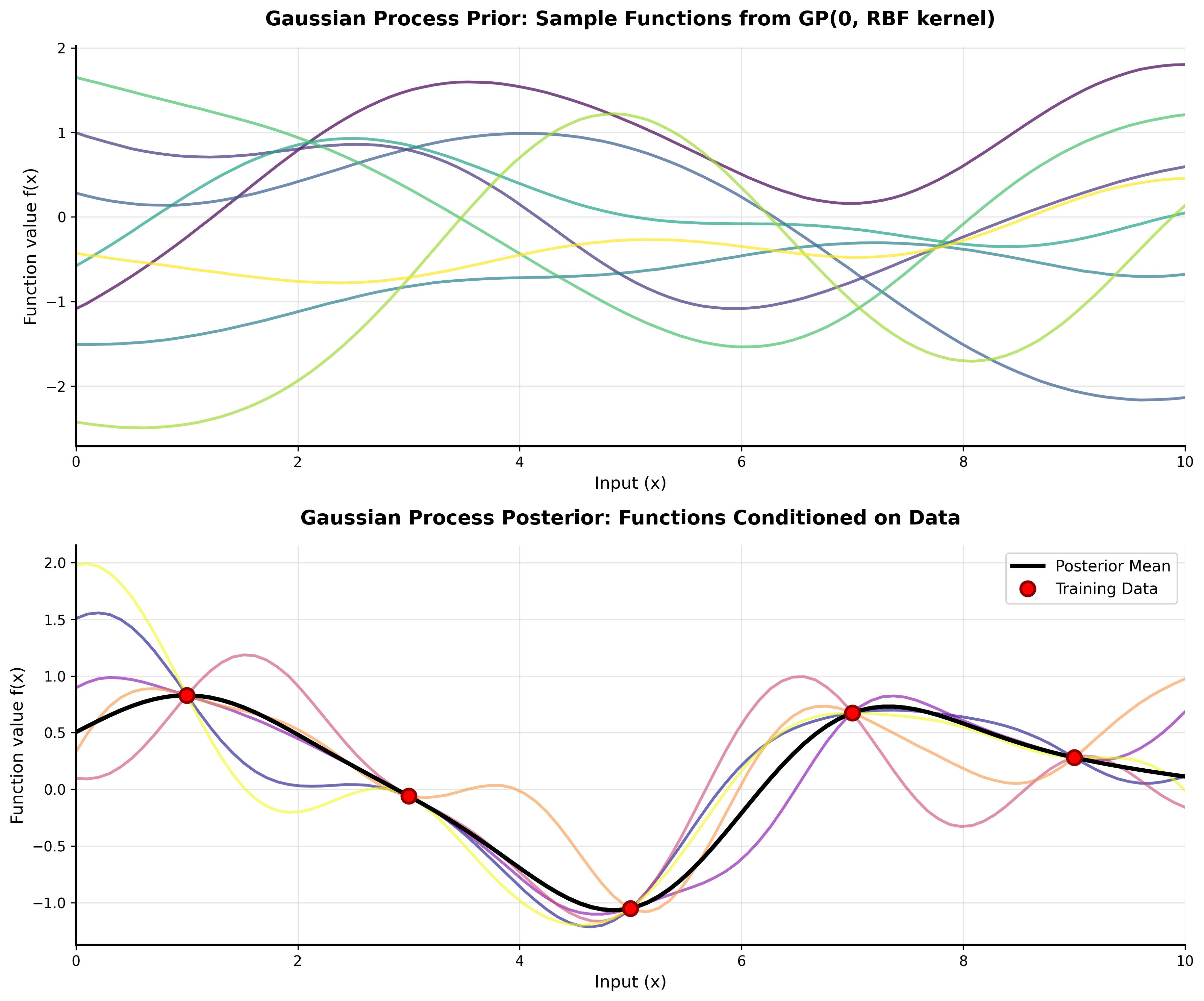
A comprehensive tutorial on understanding Gaussian Processes with interactive visualizations and practical examples.
Shared topics: